
")
")



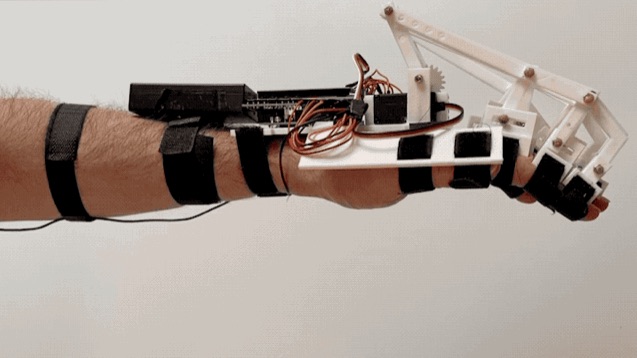 L’esoscheletro per mano è progettato per essere a basso costo, stampabile in 3D, facilmente indossabile e adatto all'uso domestico.
L’esoscheletro per mano è progettato per essere a basso costo, stampabile in 3D, facilmente indossabile e adatto all'uso domestico.
Un sistema meccanico efficiente e sotto-attuato permette di muovere le quattro dita per mezzo di un singolo motore elettrico.
L'utente può attivare volontariamente l'esoscheletro utilizzando un sistema di controllo forza-miografico (FMG), basato su una scheda a microcontrollore e una fascia da braccio sensorizzata.
Il dispositivo può fornire assistenza all’utente nelle attività di vita quotidiana e nel recupero della funzione motoria della mano paretica in seguito ad ictus cerebrale.
Ricerche correlate:
- Esposito, D.; Centracchio, J.; Andreozzi, E.; Savino, S.; Gargiulo, G.D.; Naik, G.R.; Bifulco, P. Design of a 3D-Printed Hand Exoskeleton Based on Force-Myography Control for Assistance and Rehabilitation. Machines2022,10,57
Il progetto è open-source: i CAD files per la stampa 3D sono disponibili al seguente link.
Per ulteriori informazioni, è possibile contattare l'ing.Daniele Esposito e/o il prof.Paolo Bifulco.