
")
")



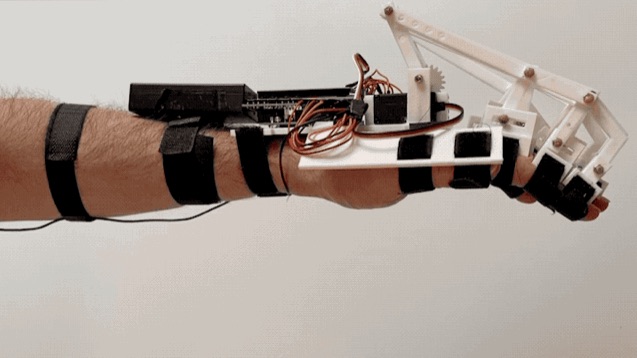 The novel hand exoskeleton is designed to be low-cost, 3D printable, fully wearable and suitable for home use.
The novel hand exoskeleton is designed to be low-cost, 3D printable, fully wearable and suitable for home use.
An efficient and underactuated mechanical system allows to move the four fingers by means of a single electric actuator.
The user can voluntarily activate the exoskeleton by using a Force-myography (FMG) control system, based on a simple microcontroller board and a sensorized armband.
The device could be of help to assist the user in activities of daily living and to recover the motor function of the paretic hand due to stroke.
Related research study:
- Esposito, D.; Centracchio, J.; Andreozzi, E.; Savino, S.; Gargiulo, G.D.; Naik, G.R.; Bifulco, P. Design of a 3D-Printed Hand Exoskeleton Based on Force-Myography Control for Assistance and Rehabilitation. Machines2022,10,57
The project is open-source: the CAD files for 3D printing are available here.
For further information, please contact: Daniele Esposito / Paolo Bifulco.
